Turbomáquinas e diagrama Polar
Uma medição importante feita utilizando a capacidade de seguimento de ordens dos analisadores de vibrações é a dos arranques e paragens de turbomáquinas e diagrama Polar.
Este artigo pertence a uma série, que constitui o material de suporte do curso de análise de vibrações em turbomáquinas. As ligações para os outros artigos podem ser encontradas aqui.
O diagrama Polar (ou de Nyquist)
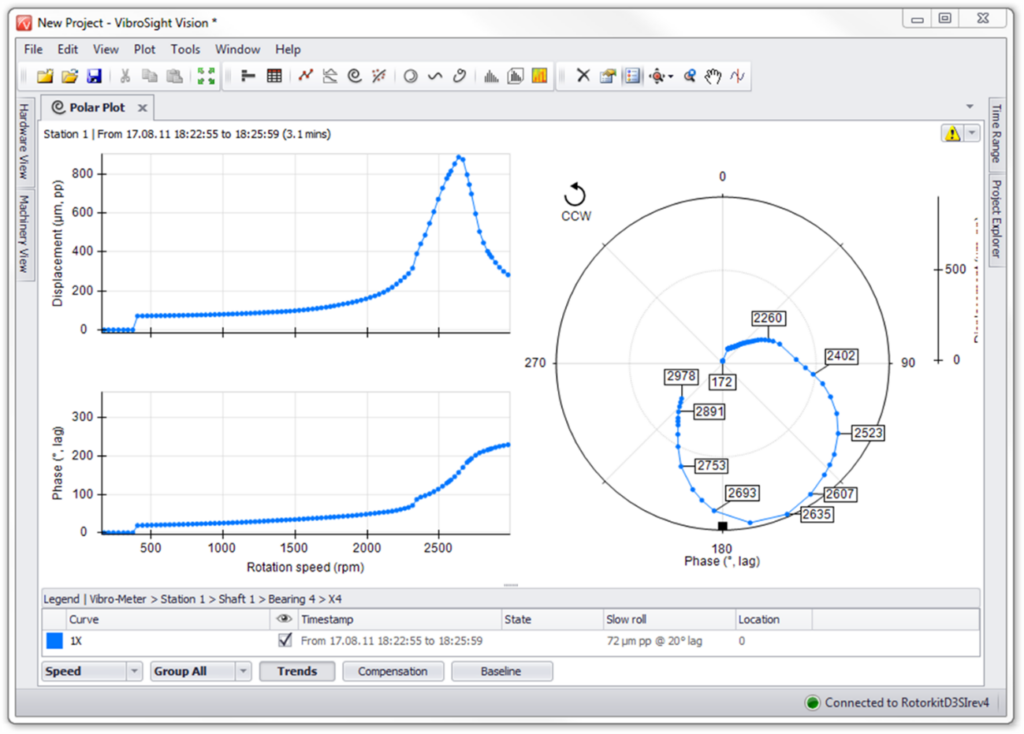
O diagrama Polaré um método comum de exibição de dados transitórios. Normalmente exibem vibração síncrona (no entanto, os dados a nX RPM também podem ser exibidos) e fase correspondente, versus velocidade de rotação.
Turbomáquinas e diagrama Polar – Figura 1– O Diagrama de Bodé do arranque de uma máquina, acompanhado do respetivo diagrama Polar, mostrando as velocidades críticas.
O gráfico polar apresenta exatamente os mesmos dados que o gráfico de Bode, apenas num formato de visualização diferente. No gráfico polar, a magnitude do vetor de deslocamento é medida radialmente, a partir do centro do gráfico, e a fase é representada circunferencialmente. Uma ressonância é indicada num gráfico polar pela velocidade a que a amplitude é um máximo de uma volta (ou seja, aproximadamente 180 graus de mudança de fase).
Às vezes, os gráficos polares facilitam a determinação de quando o rotor cruzou sua velocidade crítica, porque a mudança de fase é óbvia (ou seja, a cada 180 graus no gráfico).
As frequências naturais do rotor podem ser determinadas localizando o pico na amplitude de vibração que corresponde também a uma mudança de fase de aproximadamente 180 graus.
Turbomáquinas e diagrama Polar – interpretação de um diagrama polar
Na figura a seguir apresentada é descrito o significado da diversa informação apresentada num diagrama Polar.
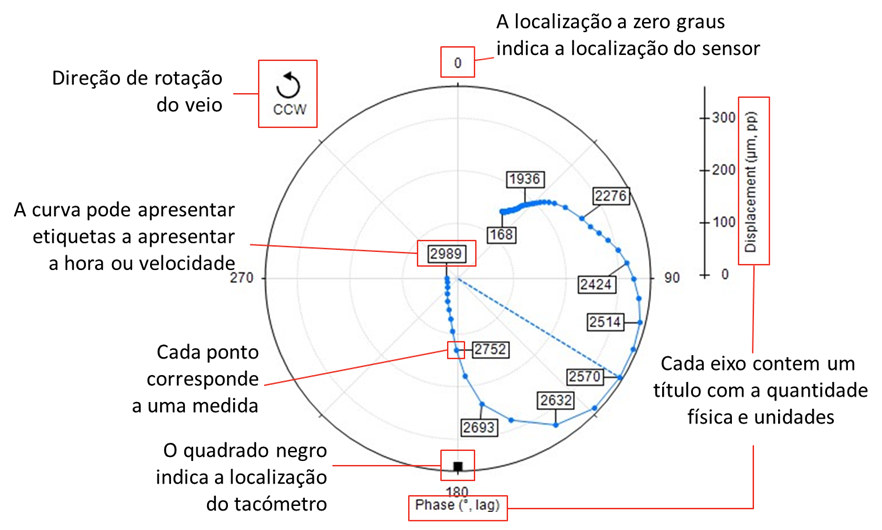
Turbomáquinas e diagrama Polar – Figura 2- Descrição do significado da diversa informação apresentada num diagrama Polar
O gráfico polar pode ser compensados por excentricidade (run-out). Todas as áreas onde o proximitor mede têm uma certa quantidade de desvio físico e/ou elétrico. Os dados vetoriais são corrigidos para esta excentricidade subtraindo vectorialmente o vetor de vibração a uma rpm muito baixa de todos os dados vetoriais obtidos.
A seguir pode ver um vídeo sobre este tema.
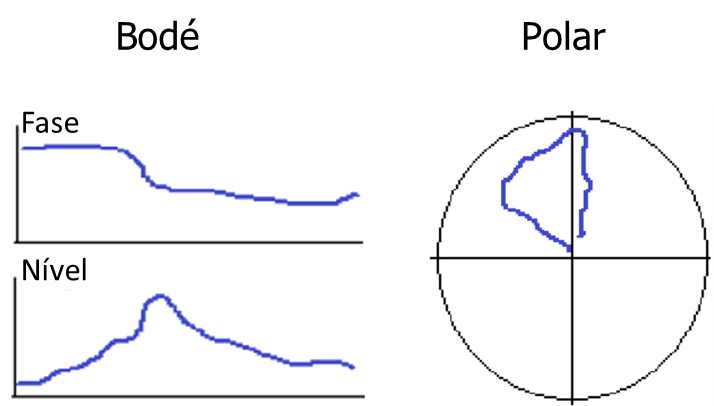
Turbomáquinas e diagrama Polar -Identificação de velocidades críticas
No diagrama Polar a velocidade crítica é identificada pelo pico máximo e pela mudança de fase de 180º.
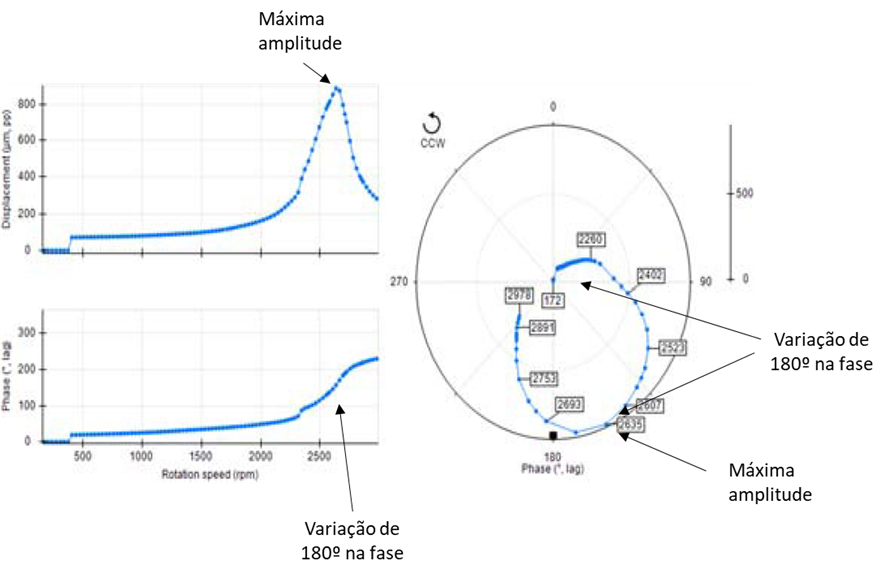
Turbomáquinas e diagrama Polar – Figura 3- No diagrama Polar a velocidade crítica é identificada pelo pico máximo e pela mudança de fase de 180º
No Diagrama Polar:
- As ressonâncias (rotor e estrutural) aparecem como voltas;
- O mesmo pico de amplitude e mudança de fase de 90 graus que o gráfico de Bode
- A volta é mais fácil de identificar do que a atividade do gráfico de Bode
- As ressonâncias estruturais aparecem como pequenas voltas internas
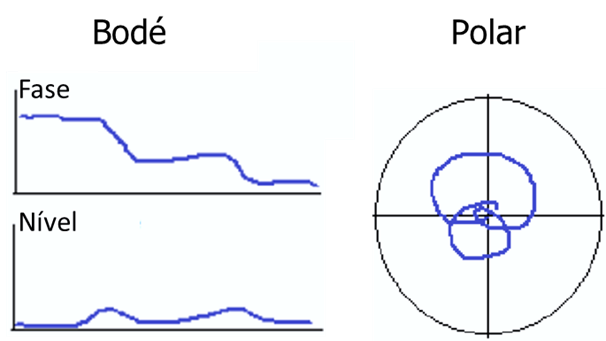
Turbomáquinas e diagrama Polar – A situação ideal
À medida que um grupo de rotores flexíveis aumenta de velocidade, a taxa de aumento da amplitude da deflexão radial, em conjunto com a mudança do ângulo de fase, indica quanto da amplitude de vibração observada é devida a um empeno estático e quanto é deflexão elástica induzida adicionalmente ou da associada respetivo modo de vibração.
No caso ideal, a amplitude deve permanecer plana ou com uma resposta muito pequena ao longo de toda a gama de velocidades e passando por uma variação do ângulo de fase em quaisquer velocidades críticas conforme se vê nos gráficos a seguir.
Turbomáquinas e diagrama Polar – Figura 4
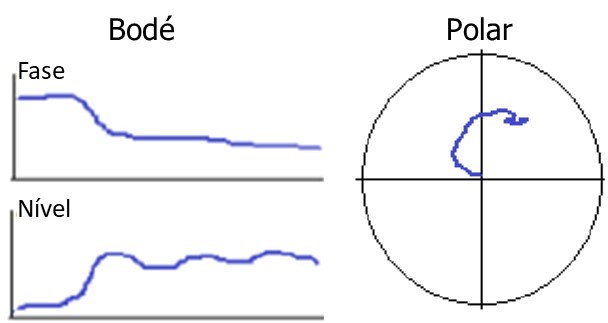
Turbomáquinas e diagrama Polar – O desequilíbrio
Num gráfico de Bodé, o identificador mais importante da presença de desequilíbrio é o padrão de inclinação da amplitude em proporção à velocidade, em combinação com a presença ou ausência de deslocação do ângulo de fase radial.
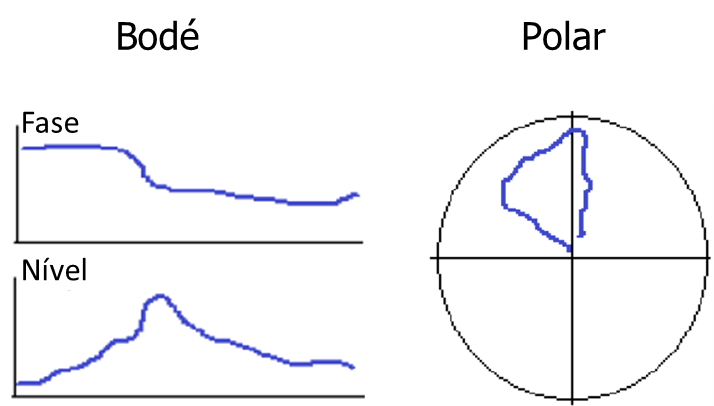
Turbomáquinas e diagrama Polar – Figura 5
Num gráfico Polar correspondente, o identificador mais importante da presença de um desequilíbrio é a presença de qualquer secção de dados em linha reta no gráfico. Uma linha reta num gráfico Polar pode ocorrer ao longo de uma velocidade variável ou a uma velocidade constante, e pode estar num ângulo de fase constante (apontando “para fora”), ou aparecer ao longo de ângulos de fase.
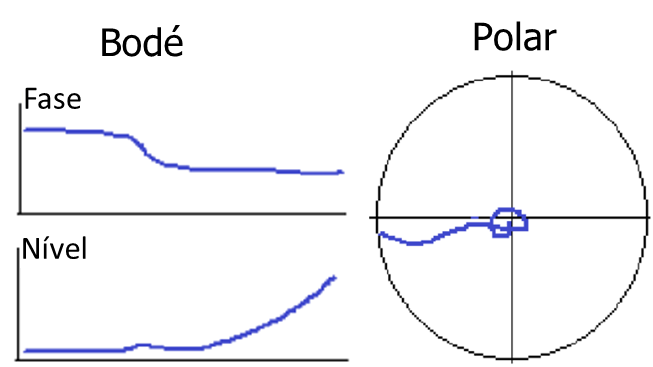
Turbomáquinas e diagrama Polar – Run out, empeno e desalinhamento
Se a amplitude a baixa velocidade for já for diferente de zero, isto é indicativo de um empeno do rotor ou de desequilíbrio, e é também frequentemente proporcional à rigidez do rotor.
Uma amplitude diferente de zero a partir de uma velocidade baixa e permanecendo plana, e sem qualquer deslocação do ângulo de fase, sugere a presença de algum run-out ou de um empeno, ou a existência de um possível “efeito de manivela”, no conjunto dos rotores devido a um moente excêntrico ou a um acoplamento não-concêntrico conforme se vê nos gráficos a seguir.
Turbomáquinas e diagrama Polar – Figura 6
Um aumento inicial na amplitude sem mudança notável na fase sugere um empeno de rotor puro ou desequilíbrio que está a ser levada pela força centrífuga, a uma órbita do veio na chumaceira, de amplitude crescente, abaixo do início da primeira região de velocidade crítica conforme se vê nos gráficos a seguir.
Turbomáquinas e diagrama Polar – Figura 7
Esta é a condição em que o rotor está a ser forçado a percorrer um movimento, não concêntrico, com o seu eixo geométrico.
Se a amplitude continuar a aumentar enquanto o ângulo de fase começa a mudar, isso indica que está a ser adicionada uma componente dinâmica/forma de vibração ao movimento giratório conforme se vê no gráfico a seguir. Se a deslocação total do ângulo de fase for notavelmente inferior a 180 graus, isto indica que a amplitude da órbita do veio na chumaceira é dominante sobre qualquer deflexão elástica associada respetivo modo de vibração.
Turbomáquinas e diagrama Polar – Figura 8
A influência do comportamento de outros rotores acoplados
Se o ângulo de fase se deslocar 180 graus, com uma alteração mínima na amplitude da deslocação, isso sugere que o rotor movimentado por um rotor vizinho, que passa pela sua região de velocidade crítica conforme se vê nos gráficos a seguir.
Turbomáquinas e diagrama Polar – Figura 9
Da mesma forma, uma “saliência” do gráfico de Bodé na amplitude do deslocamento sem uma mudança de fase também pode vir da resposta de um rotor vizinho.
Tais situações são prontamente avaliadas através da revisão da gama de velocidades específica das respostas de amplitude e fase nos gráficos de Bodé de todos os rotores.
Em casos como este, é muito dispor de um modela de Elementos Finitos dos rotores para identificar as frequências naturais inerentes de cada rotor.
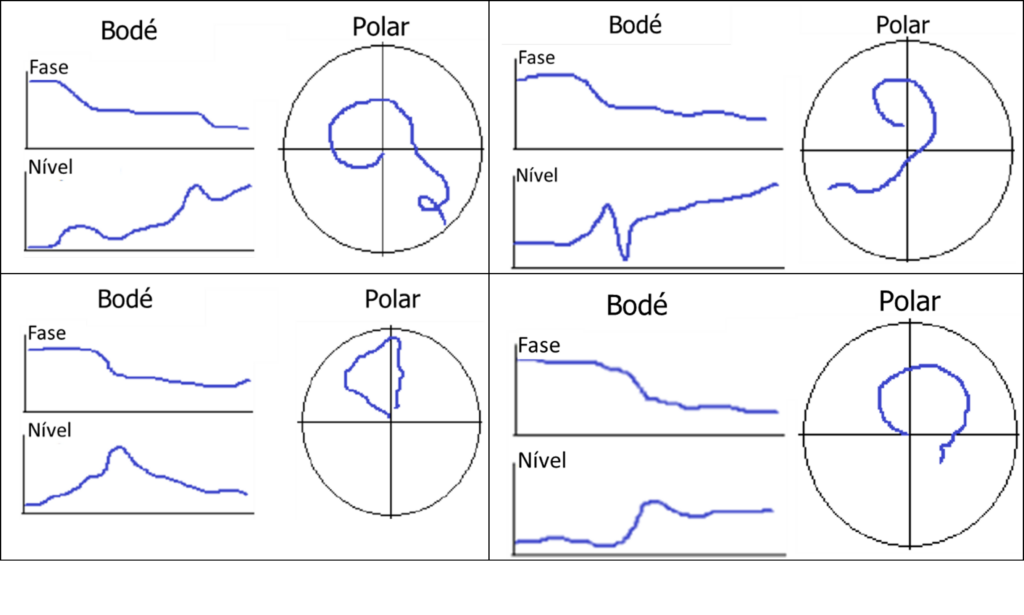
Movimento de oscilação do rotor – assimetria axial na distribuição da excentricidade
A velocidades acima da primeira velocidade crítica, uma tendência de amplitude ascendente sem qualquer mudança notável do ângulo de fase é uma indicação imediata de assimetria axial na distribuição da excentricidade que gera o modo de oscilação/pivotagem conforme se vê nos gráficos a seguir.
Turbomáquinas e diagrama Polar – Figura 10
Por vezes, observa-se uma resposta de amplitude adicional com uma deslocação do ângulo de fase sobreposta à tendência ascendente que é indicativa de uma resposta ressonante na segunda velocidade crítica, conforme se vê no gráfico anterior (do lado direito).
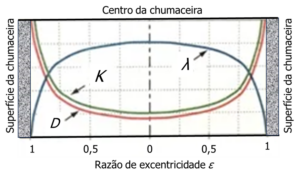
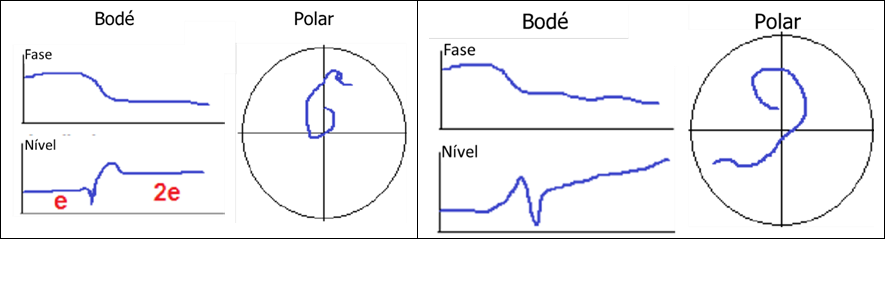
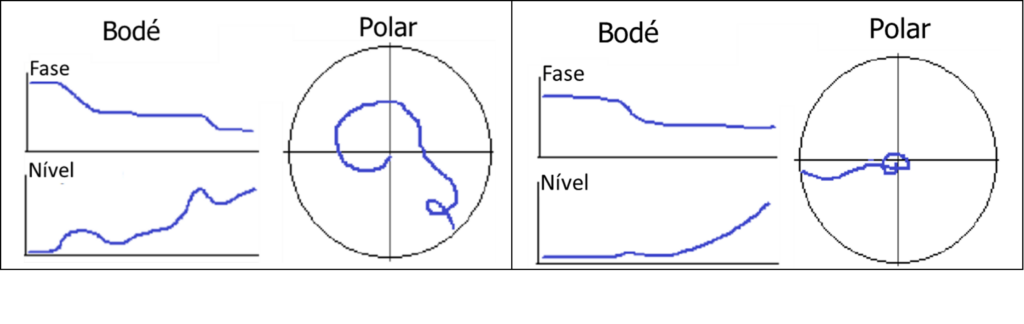
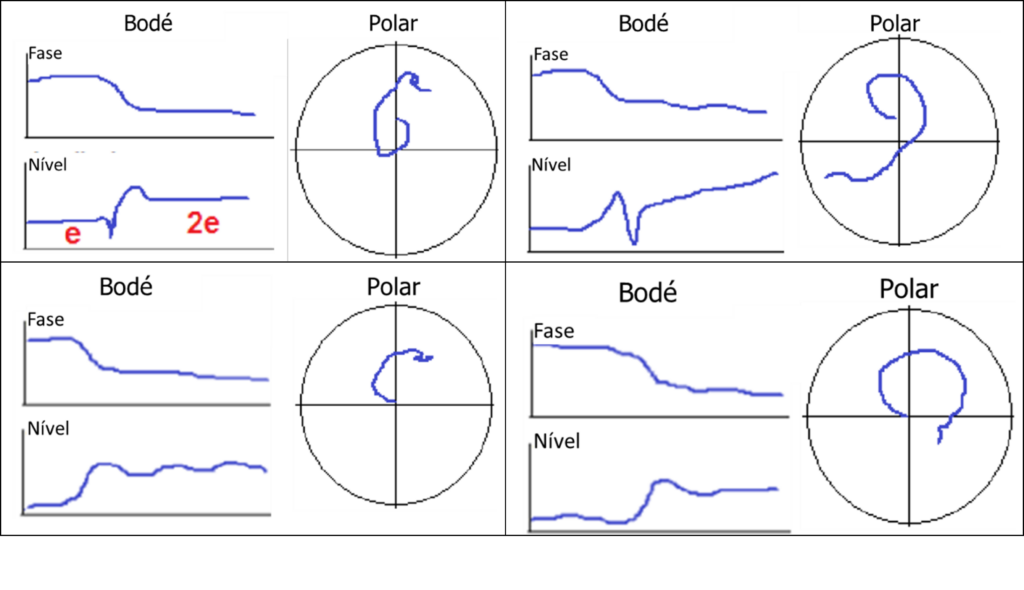
Turbomáquinas e diagrama Polar – Excentricidade
Outra indicação comum de excentricidade é quando a amplitude acima da primeira velocidade crítica é aproximadamente o dobro da medida abaixo da primeira velocidade crítica, ou simplesmente permanece elevada, mas algo plana conforme se vê nos gráficos a seguir.
Turbomáquinas e diagrama Polar – Figura 11
Isto é uma função do rotor que muda a posição do seu eixo de rotação quando passa pela região de velocidade crítica. A velocidades mais baixas, os sensores medem a quantidade direta de excentricidade do eixo da massa em rotação em torno do eixo do geométrico, indicando uma amplitude igual à excentricidade, e. Quando o rotor é suficientemente flexível, pode ser medida uma amplitude reduzida no moente, uma vez que o rotor pode principalmente “oscilar” ou fletir no seu plano médio, absorvendo a maior parte da força correspondente.
A velocidades mais elevadas, os sensores vêm o “rotor inteiro” a girar em torno do eixo da inércia enquanto continua a rodar, de tal forma que os sensores medem a excentricidade intrínseca, bem como a medida da excentricidade, indicando uma amplitude de 2e.
Reduções de amplitude devido à mudança de posição do eixo de rotação
Por vezes, também se observa uma breve descida da amplitude antes ou depois do pico de velocidade crítica. Esta queda corresponde a um breve momento de auto-equilíbrio do rotor na transição entre eixos de rotação. Se for antes do crítico, indica que a resposta ressonante é dominante, e se for visto após o crítico, indica que o modo rígido impulsionado pela excentricidade e força centrífuga é dominante conforme se vê nos gráficos a seguir.
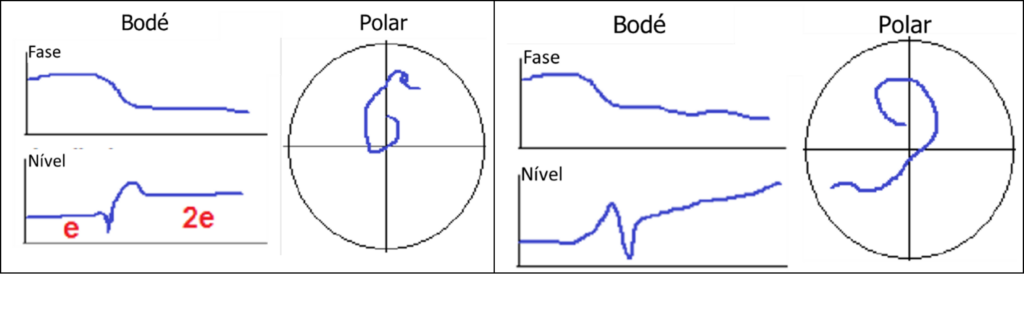
Turbomáquinas e diagrama Polar – Figura 12
Mudança de posição do eixo de rotação
Quando uma linha reta é visível num gráfico Polar, ao longo de uma gama de ângulos de fase, isto indica que o alinhamento global do eixo de inércia está a mudar, impulsionado pela tendência de auto-alinhamento do eixo inércia, depois de uma velocidade critica. Ou seja, o veio está a passar da rotação em torno do eixo geométrico para a rotação em torno do eixo de inercia.
Turbomáquinas e diagrama Polar – Figura 13
Isto é frequentemente verificado com uma mudança simultânea na posição da linha central do veio numa ou mais chumaceiras. Adicionalmente, num conjunto de multi-rotores, um rotor com uma massa maior (frequentemente o gerador, ou uma turbina LP) puxará os rotores mais leves (normalmente numa chumaceira exterior, frequentemente uma turbina HP ou um excitador) para a sua própria linha de alinhamento “natural” baseada na excentricidade ou no alinhamento da chumaceira do rotor pesado. Isto será visível como uma linha reta num gráfico polar em combinação com uma mudança na posição da linha central do veio.