MCM – Monitoreo Motor Eléctricos Estado
Análisis de motores eléctricos con tecnología de MCM – Monitoreo Motor Eléctricos Estado
1 introducción
O MCM – Motores eléctricos Condition Monitoring es una reciente tecnología de análisis de motores eléctricos, que las obras basadas en la inteligencia artificial que compara el motor real para ser monitoreados, con un modelo matemático del motor, corriendo hasta 600 diferentes condiciones de carga. Este modelo matemático se obtiene de un período de aprendizaje que dura unos pocos días.
Esta tecnología fue desarrollada para la NASA para hacer el control de estado del motor principal del transbordador espacial.1)
El MCM de diagnóstico del sistema de supervisión también está diseñado para detectar fallos eléctricos en los motores, en respuesta a las limitaciones de monitoreo de vibraciones. Además de los modos de fallo eléctricas, también detecta los modos de fallo mecánico del motor o la maquinaria accionada. Emerge como la única alternativa en situaciones donde la vibración de vigilancia no es práctico dedicado, lo suficientemente económica o integral. Se puede detectar cambios en la carga se enfrenta al motor debido a anomalías en el equipo o proceso impulsado, como cavitación o la obstrucción de los filtros y pantallas.

Figura 1 - Un monitor de MCM – Monitoreo Motor Eléctricos Estado
MCM se instala en la potencia del motor y muy por encima, y no requiere la instalación del sensor en el propio motor o máquina accionada, al contrario de lo que sucede cuando se utiliza una analizador de vibraciones, Es especialmente adecuado para equipos inaccesible o conducido en áreas peligrosas y es aplicable a la mayoría de tipos de bombas, compresores y máquinas similares. También es adecuado para el control de bombas sumergibles, bien, el fondo del pozo y encapsulado.
2 Principio de funcionamiento del MCM – Monitoreo Motor Eléctricos Estado
Para realizar el análisis de monitor de motores MCM eléctrica utiliza una combinación de formas de onda dinámicas para tensión y corriente, junto con los modelos aprendidos, para detectar fallos en el motor o el equipo accionado. El aprendizaje se apoya en una base de datos adicional, Si el monitor se ha instalado en un motor ya defectuosa. El monitor detecta diferencias entre las características actuales observados y las características aprendidas y relaciona estas diferencias fallidos.
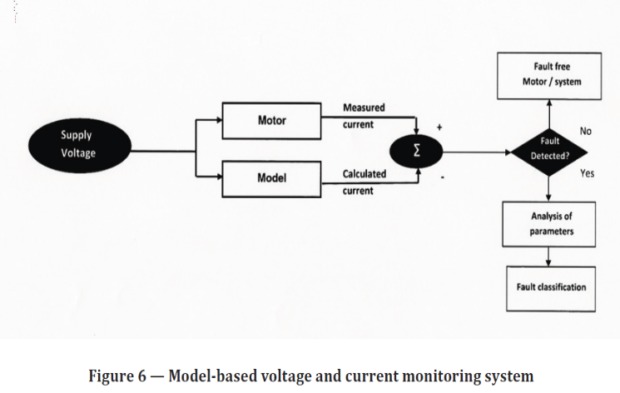 Figura 2 - trabajar MCM principio del monitor – Monitoreo Motor Eléctricos Estado, Se basa en el desarrollo de un modelo matemático del motor eléctrico y la observación de las desviaciones de este modelo1)
Figura 2 - trabajar MCM principio del monitor – Monitoreo Motor Eléctricos Estado, Se basa en el desarrollo de un modelo matemático del motor eléctrico y la observación de las desviaciones de este modelo1)
La detección de fallos motor eléctrico se basa en un motor de plantillas, aprendido por el monitor, basado en la física, en el que las constantes en el modelo se calculan a partir de datos en tiempo real y se comparan con valores aprendido previamente.
La detección de fallos mecánicos se basa en amplitudes de densidad de la potencia espectral (PSD) en las bandas de frecuencia específicas, en relación con los valores aprendidos. Esta información se combina de forma automática con conocimiento especializado en el diagnóstico. Debido a este enfoque banda espectral, detección de fallo mecánico proporciona una guía para una clase de posibles fallos. La sensibilidad a algunos defectos (por ejemplo, fallas de apoyo de los elementos de rodadura) disminuir con la distancia desde el componente falla vías. Por otro lado, fracasos que carga aumento motor son independientes de la distancia desde el motor.
3 La diferencia entre el MCM – Motor eléctrico Condición de Monitoreo y análisis de la corriente de alimentación del motor (MCSA)
La detección de un fallo mecánico basado en espectro monitor de MCM, Es similar a lanálisis de motor firma actual (MCSA), pero varias diferencias importantes para diferenciar el MCSA típica.
El monitor MCM usos relaciones causa-efecto (voltaje de corriente), mientras que el MCSA utiliza sólo la corriente. Los cambios en la tensión de entrada provocarán cambios en la corriente que pueden conducir a falsas alarmas en MCSA. La relación causa-efecto en el procesamiento MCM ayuda a proteger contra estas falsas alarmas.
 |
 |
| El motor de análisis de firma actual (MCSA) | Un monitor de MCM – Monitoreo Motor Eléctricos Estado, utiliza las relaciones de causa-efecto (voltaje de corriente), |
Figura 3 - La diferencia entre el análisis de la firma actual y el análisis de MCM – Monitoreo Motor Eléctricos Estado
Las anomalías detectadas en el motor eléctrico se someten a un algoritmo de cambio persistencia sofisticada para proteger contra las falsas alarmas, por lo que es menos sensible a las fluctuaciones aleatorias MCM monitorizar las señales.
El análisis MCM es diferente de la MCSA. El MCSA implica el análisis espectral de la forma de onda de corriente observada (a veces demodulada), MCM como el procesamiento produce diagrama de densidad espectral de potencia de una (PSD) de la forma de onda de la corriente residual (la diferencia entre la forma de onda teórica y forma de onda de corriente de la corriente medida).
4 La adquisición de datos en el MCM – Monitoreo Motor Eléctricos Estado
Las señales de tensión y corriente de las tres fases (6 señales en total) Ellos son enviados al monitor, donde son digitalizadas para procesamiento adicional de la señal. voltajes por debajo 480 V se puede medir directamente, mientras que voltajes más altos requieren un transformador en la carcasa del motor eléctrico. Dependiendo de la aplicación, Se utilizan transformadores de corriente o sensores de corriente con efecto Hall, para detectar y reducir la corriente del motor.
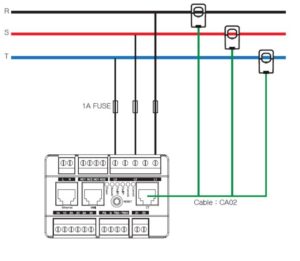
Figura 4 – enlaces esquema de MCM – Monitoreo Motor Eléctricos Estado, para el análisis de los motores eléctricos
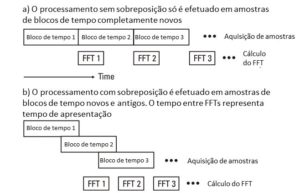
MCM opera en ciclos de procesamiento de iteración con una duración de 90 segundos. Al comienzo de cada 90 segunda iteración, el monitor recoge muestras de formas de onda de tensión y corriente de las tres fases V1, yo1, V2, yo2 e V3, yo3. El resto del período se usa para la post-procesamiento y actualizar el análisis del panel frontal.
5 Modelado y detección de fallos
Un monitor de MCM – Motor Eléctricos Estado utiliza el monitoreo cuatro enfoques diferentes para la detección y análisis de fallos de los motores eléctricos:
- Uno se basa en las características internas del motor eléctrico;
- Otra se basa en el análisis de frecuencia del espectro de corriente residual;
- Una tercera se analizan las tensiones y las corrientes reales de potencia del motor eléctrico para verificar ciertos tipos de fallas en el suministro eléctrico y la corriente;
- La cuarta utiliza los datos de una base de datos motores eléctricos similares, para proporcionar una referencia de diagnóstico independiente.
5.1 El motor del modelo interno en el MCM – Monitoreo Motor Eléctricos Estado
Para motor eléctrico óptima, Las formas de onda son tensión sinusoidal y la corriente en la frecuencia de red. El cambio de tensión de red crea las fuerzas magnéticas que provocan que el rotor gire y la amplitud y fase de las corrientes del motor están relacionados con las tensiones de entrada a través de la operación mecánica del motor eléctrico y el interno. Podemos pensar en las formas de onda de la tensión de red como entradas para el motor eléctrico y las formas de onda reales como salidas.
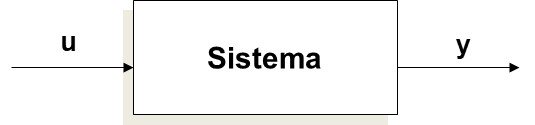
Las partes eléctricas y mecánicas en el interior del motor eléctrico pueden ser considerados como una función de transferencia que convierte la forma de onda de la forma de onda de voltaje de entrada de la corriente de salida (Figura 5).
Esta es la clave para entender el modelo de motor interno en el monitor de MCM – Monitorización del motor Condición.

Figura 5: El motor eléctrico como una función de transferencia. Una forma de forma de onda de tensión de alimentación se convierte en una forma de onda de corriente del motor.
El monitor utiliza un modelo lineal para las partes internas eléctricas y mecánicas del motor eléctrico. Este modelo basado en la física se deriva de un conjunto de ecuaciones diferenciales y se puede expresar como una función de transferencia. Durante el proceso de aprendizaje, el monitor determina los coeficientes de este modelo. Para un motor eléctrico normal de, la función de transferencia modelo es un gran acercamiento a la transferencia física real de la función motora.
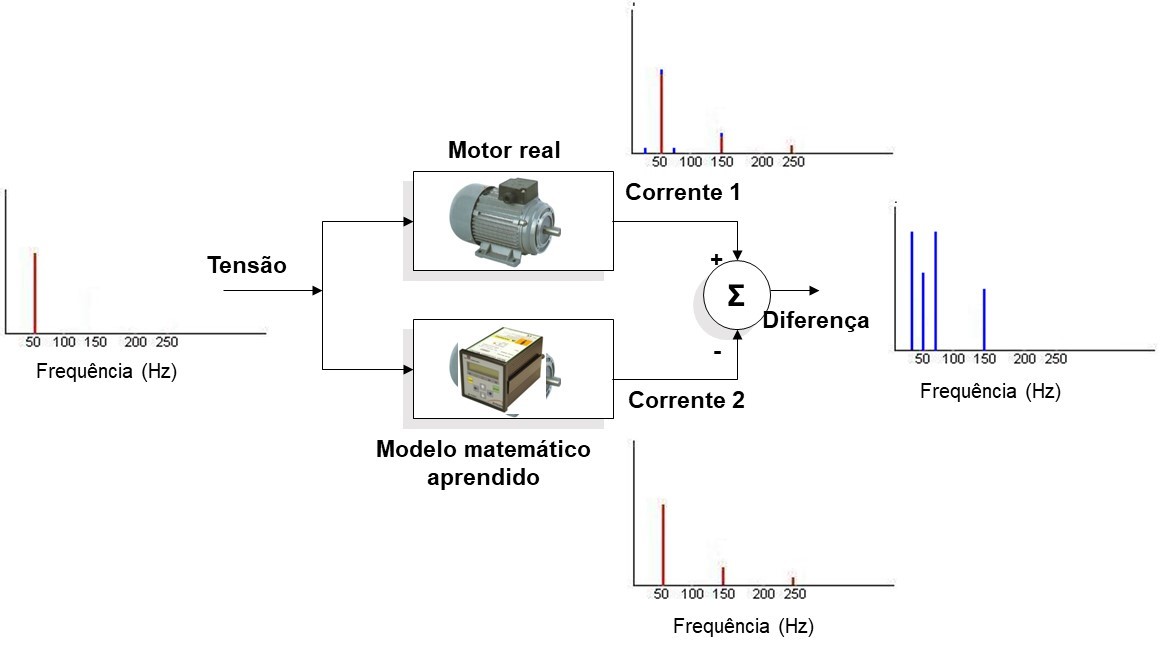
durante el monitoreo, un monitor de MCM – Monitoreo Motor Eléctricos Estado, medidas de la forma de onda de la tensión de entrada y la pasa a la función de transferencia modelo para obtener una corriente teórica de forma de onda. Mientras eso, la función de transferencia real de motor convierte la forma de onda de la tensión de entrada en la forma de onda de corriente observada (medida). La forma de onda de corriente teórica se resta de la forma de onda de la corriente medida para producir una corriente residual de forma de onda (Figura 6). La forma de onda residual contiene “desviaciones” entre la teoría y la realidad, y el monitor utiliza esta forma de onda residual para el análisis de fallos mecánicos.
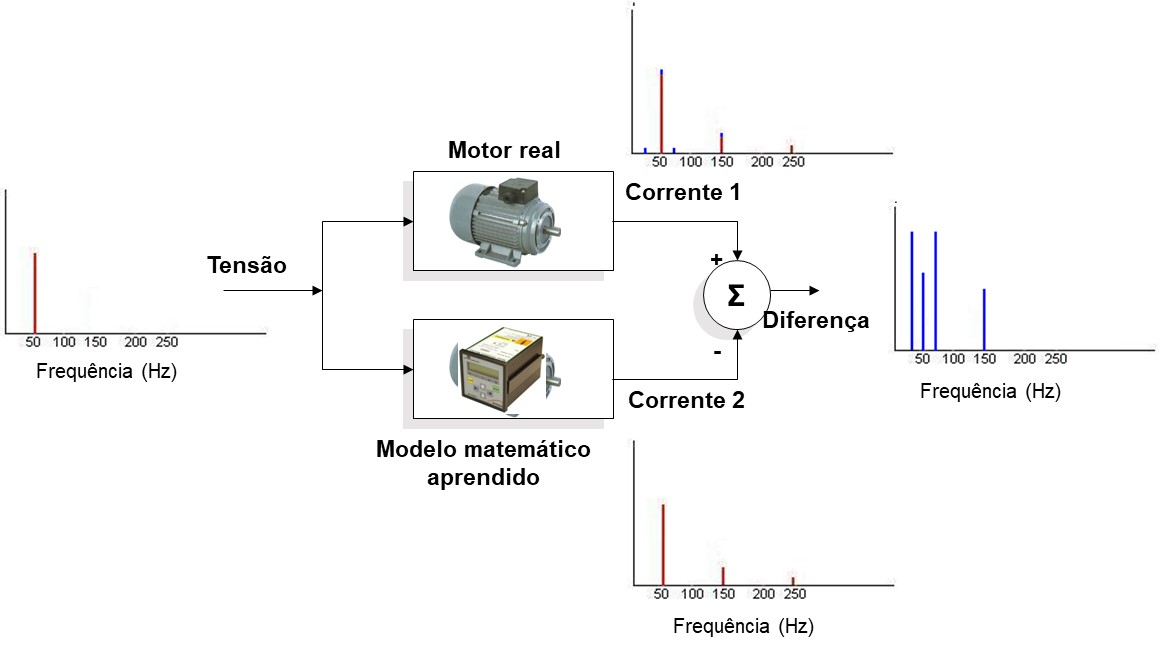
Figura 6: La forma de la onda de tensión de alimentación pasa a través de la función de transferencia real de motor, la producción de una forma de onda del flujo actual, con una distorsión armónica, yoMotor. La misma tensión de forma de onda se pasa a través de la función de transferencia del modelo aprendido, la producción de una corriente teórica de forma de onda, yoModelo. Las dos formas de onda se restan, produciendo una corriente residual de forma de onda. La forma de onda residual representa la desviación entre la teoría y la realidad
Anexo I y la referencia 2) Se trata de una descripción matemática del sistema.
5.2 La detección de modos de fallo de motor eléctricos en MCM – Monitoreo Motor Eléctricos Estado
Los cambios en las características internas del motor eléctrico (por ejemplo, un devanado en cortocircuito) hará que la función real del motor eléctrico es cambiada de transferencia. durante el monitoreo, MCM obtiene las formas de onda de tensión de accionamiento y las mediciones de corriente y calcula un nuevo conjunto de coeficientes observados para el modelo de motor interno. Los coeficientes de los coeficientes del modelo originales se restan de los residuos observados a productos. Estos residuos se utilizan para detectar problemas internos de motor eléctrico.
5.3 La detección de fallos mecánicos en el motor eléctrico o máquina accionada
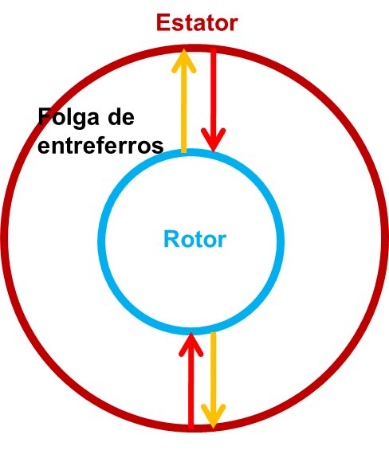
En un motor eléctrico ideales, el rotor sería perfectamente centrada en la brecha de estator, giraría y sin problemas no presentaría desequilibrio. En los motores reales, el rotor no está perfectamente centrada en el estator, cojinetes y el equipo accionado y crear fuerzas vibraciones y el rotor siempre tiene algún desequilibrio.
Los fallos mecánicos perturban la posición del rotor y crean perturbaciones y distorsiones en las formas de onda reales. Como fallos se desarrollan en máquina de montaje, hacer que la corriente de salida real se desvía más lejos de la teórica.
Por ejemplo, un rotor desequilibrado vibrar RPM 1X, provocando un cambio en la brecha del rotor / estator en rotación. Este cambio hace que la modulación de amplitud de las señales actuales y le hace aparecer bandas laterales alrededor de la frecuencia de red, no espectro de PSD.
 |
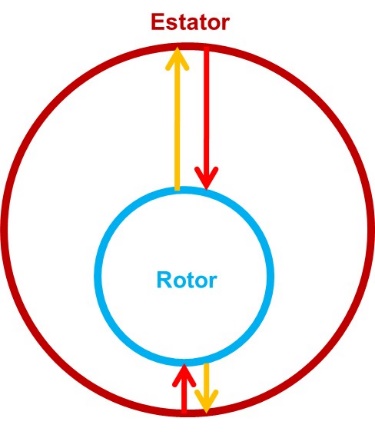 |
Figura 7: Las fuerzas / vibraciones mecánicas se origina una variación en la distancia entre los hierros de motor
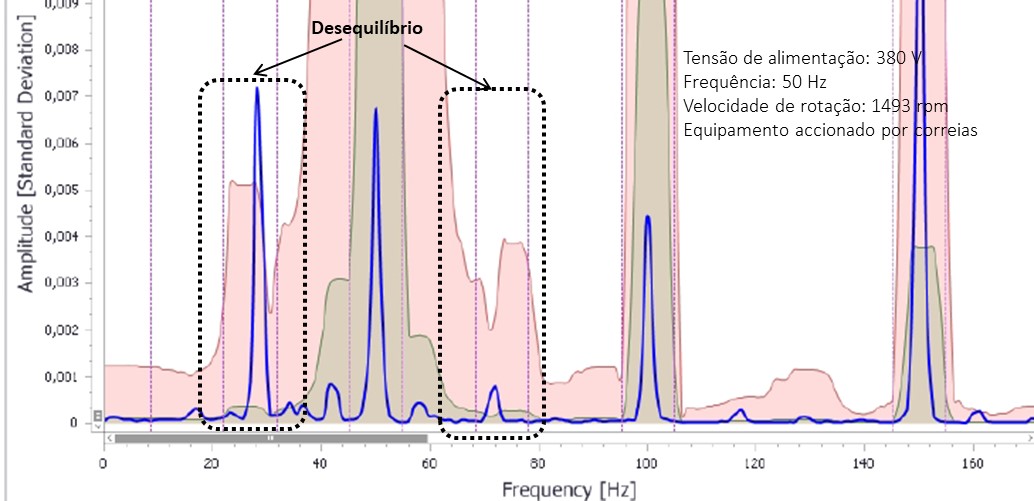
Figura 8 No espetro de PSD do MCM – Monitoreo Motor Eléctricos Estado, desequilibrio del motor se manifiesta alrededor de la frecuencia de alimentación ± 1 x rpm y múltiple.
En otro ejemplo, un fallo en un cojinete causará una perturbación periódica en la posición del rotor; este trastorno en la posición del rotor creará una perturbación correspondiente en los huecos de aire y la brecha de ancho de modulación de la corriente del motor. La modulación produce alrededor de las bandas laterales de frecuencia de la red en la corriente residual del espectro y la distancia de las bandas laterales de los corresponde frecuencia de la red a la frecuencia de defecto de cojinete.
Otros tipos de error pueden producir una amplia variedad de contenido de frecuencia adicional en las formas de onda reales. El MCM procesamiento – Monitoreo Motor Eléctricos Estado, exigir que el contenido de frecuencia adicional y lo utiliza para diagnosticar diferentes tipos de problemas mecánicos.
La forma de onda de la corriente residual MCM se basa en un modelo aprendido, y, por lo tanto, PSD es un espectro de diferencia entre la teoría y la realidad. tan, el primer método MCM detecta los cambios en la corriente del motor y luego clasifica las características espectrales de este cambio en las clases de falla. El monitor clasifica la energía del espectro de PSD en doce bandas de frecuencias espectrales típicos asociados con las clases de fallos específicos.
5.4 Una corriente de defecto y el poder
Durante el periodo de aprendizaje, un monitor de MCM – Monitoreo Motor Eléctricos Estado, aprende el comportamiento típico de este motor eléctrico. Voltaje o desviaciones actuales del comportamiento normal pueden indicar un problema. El monitor comprueba cambios significativos en el factor de potencia, voltaje y desequilibrio de corriente. Como un aumento en la carga accionada, se producirá un aumento de la corriente del motor, metodología MCM utiliza corriente anormal como un indicador de un problema de carga. Por ejemplo, disminuir el flujo a través de un ventilador o un soplador provocaría una disminución de la carga de la corriente del ventilador y motor, y esto podría indicar una obstrucción en el flujo.
6 La base de datos del motor eléctrico
El monitor tiene una base de datos característica de la señal de forma de onda residual, que son representativos de una gran base de datos de motores eléctricos similares. Esto se utiliza como una manera de evitar las alarmas perdidas, si el monitor MCM está instalado en un motor ya defectuosa. Cuando un valor medido excede el valor de la base de datos de alerta, para esta banda de frecuencias (Figura 8), un monitor de desaparecer – suponiendo que el nivel de alarma se ha excedido en el test de aprendizaje.
7 aprendizaje
Cuando se instala por primera, el monitor aprende el comportamiento motor eléctrico al que está conectado. Pasa algún tiempo para aprender antes de empezar a controlar el motor.
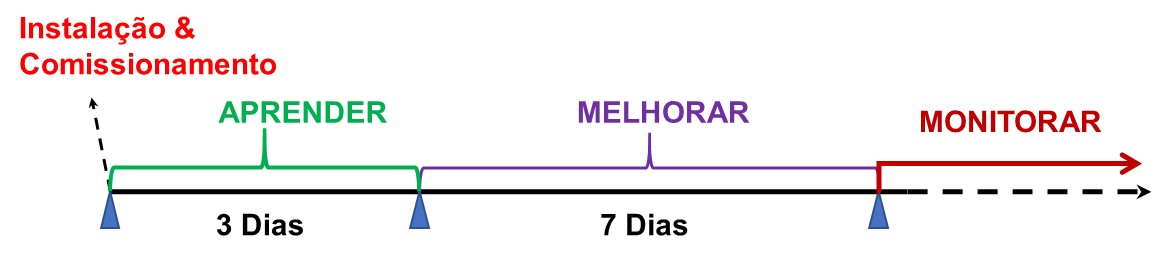
Figura 9 – Para construir el modelo matemático del motor eléctrico que está conectado, O MCM – Monitoreo Motor Eléctricos Estado, Es necesario para completar el período de aprendizaje. Este período puede tomar 7 una 10 días.
Algunos motores eléctricos en coche equipos que operan a velocidad constante y carga. Este es el modo más simple de aprender y el monitor, ya que cualquier cambio en las características de funcionamiento es probablemente indicativa de un fallo. Muchas máquinas funcionan a velocidad variable o de carga variable. En este caso, lo cual es normal para un rango de carga, Puede ser anormal para otro. En esta situación, los aprende de monitor y crea un modelo de motor interno separado para cada modo de funcionamiento. entonces, al cambiar las condiciones, cambia de un modelo a otro.
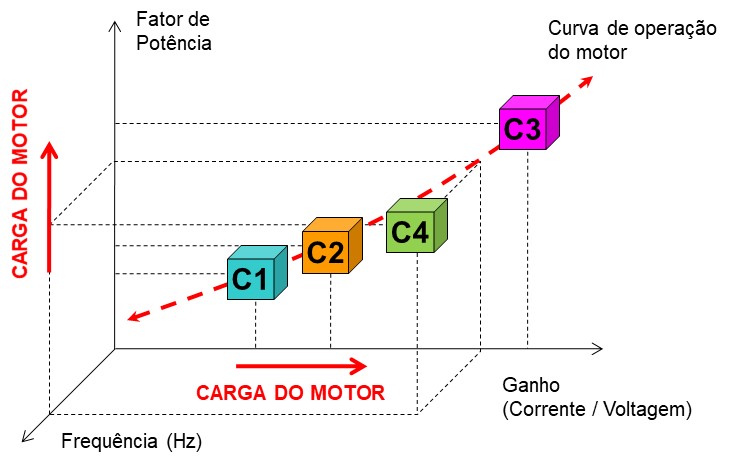
Figura 10 – Durante el periodo de aprendizaje, O MCM – Condición eléctrica vigilancia de motores trata cada punto de funcionamiento del motor, como un grupo en el espacio tridimensional (factor de potencia, ganancia, velocidad de avance). Cada grupo tiene un modelo separado. En el modo de monitoreo, cada dato se compara con el grupo más cercano. Se pueden crear hasta 600 grupos.
El periodo de aprendizaje dura aproximadamente MCM 10 días (Figura 9), el motor eléctrico es constante o variable velocidad. durante el aprendizaje, itera el monitor recogida de formas de onda, la realización de análisis y repitiendo el proceso. Durante cada iteración 90 segundos, recoger simultáneamente formas de onda de voltaje y corriente para cada fase y, en seguida, realiza el análisis numérico de los datos. Durante la fase inicial de aprendizaje de tres días, unidad de MCM no supervisa. Es muy ocupado construyendo un modelo del motor primario interno y estadísticas espectrales.
El período de aprendizaje tiene dos etapas.
- Etapa de aprendizaje, en el que las señales clasifica MCM y no realiza ninguna vigilancia de;
- paso mejora, en el que los MCM se inicia el seguimiento y también actualiza el modelo matemático (construido durante la primera etapa) con nuevos datos.
Una vez finalizada la fase inicial de aprendizaje, unidad de MCM – Motores eléctricos de monitorización de estado comenzará a controlar el motor. Mientras eso, seguir mejorando el modelo por otros siete días (fase de "mejorar"). Para motores de velocidad variable, estas iteraciones se encuentran dispersos cómo se requieren muchos modos de operación. Durante las fases de aprender y mejorar, El interruptor de funcionamiento del motor de un modo de funcionamiento a otro, el monitor guardará los datos anteriores y empezar a aprender el nuevo modo de funcionamiento. Cuando la parte trasera del motor a la parcialmente completada por lo, el monitor seguirá aprendiendo desde el último punto.
Una vez completado el proceso de aprendizaje, el monitor se detiene el modelo de refinamiento, y continuamente monitoriza el motor usando modelo interno completo del motor y las características espectrales de la PSD.
Se, después de la finalización del modelo, el motor eléctrico en un nuevo modo de operación que nunca se ha visto antes, el monitor activará la alarma si las formas de onda medidas son significativamente diferentes de lo que fue modelado. En ese momento, el usuario puede dirigir manualmente la unidad de MCM – Monitoreo Motor Eléctricos Estado, para aprender la nueva forma de utilizar el "Refresh". El MCM aprender el nuevo modo de funcionamiento y no supervisará el nuevo modo hasta que se complete el proceso de aprendizaje de actualización.
A lo largo del aprendizaje, si la potencia del motor eléctrico se interrumpe o MCM, el monitor se recuperará y seguir aprendiendo de forma automática el último punto.
8 La detección de cambio, la persistencia y la alarma
Debido a los cambios de ruido y menores en las características operativas, siempre hay alguna variación entre el modelo observado sucesivamente y los parámetros de espectro. Durante la fase de aprendizaje, un monitor de MCM – Motores eléctricos Condition Monitoring crea estadísticas que describen la variación que se produce. Cuando se ha completado el aprendizaje, el monitor tiene un conjunto de estadísticas para cada coeficiente modelo (fallas eléctricas) y la banda espectral (fallas mecánicas).
La unidad de MCM – Motores Condition Monitoring funciona detectando diferencias entre los parámetros observados y aprendida previamente; coeficientes del modelo internos o amplitudes de la banda espectral. Estas diferencias deben pasar antes de una prueba estadística que se consideraron significativamente diferentes. Estas pruebas establecer umbrales de alarma. Las alarmas de la línea de exploración se generan en base a las fluctuaciones de la tensión de desequilibrio de tensión y variaciones en la gama encuentra durante la fase de aprendizaje. Un método de alarma similar se utiliza para el factor de potencia, La distorsión armónica total, valores efectivos de valores de desequilibrio de tensión e intensidad de corriente y tensión y.
Incluso en una máquina normal, pueden producirse desviaciones importantes de vez en cuando. Para evitar falsas alarmas, procesamiento MCM – monitoreo Motores Eléctricos condición requiere que el cambio detectado es persistente durante el tiempo. El monitor utiliza un sofisticado algoritmo que compara la cantidad por la cual un parámetro excede el valor umbral y el número de veces que se produjo en una ventana de tiempo. Esta ventana deslizante varía dependiendo de la cantidad en la que el parámetro medido supera el umbral estadístico. Los grandes excedencia límite sólo requieren un período de tiempo breve, mientras que la ligera superación requerirá una ventana larga. El monitor sólo dispara una alarma cuando se cumple el requisito de persistencia.
9 Diagnóstico
Un monitor de MCM – Motores eléctricos Condición informes de seguimiento de fallos Figura categorías 11) que funcionan como signos y apuntan a áreas que deben ser investigados con más detalle. Se utiliza cuatro métodos independientes de los fallos de detección que abarcan dos categorías: eléctricos y mecánicos.
9.1 El diagnóstico de fallas eléctricas
Los fallos eléctricos están asociados con problemas en el motor interno o problemas de alimentación externos. unidad MCM supervisa los dos métodos utilizando dos independiente. Los fallos internos del motor se detectan usando el modelo interno aprendido del motor como una referencia. Durante el seguimiento de cada iteración, el monitor calcula un conjunto de ocho parámetros del modelo de motor internos basado en corriente y tensión observó. Estos parámetros observados se comparan con los parámetros obtenidos durante la fase de aprendizaje y cambios persistentes y significativos se detectan y reportado como fallas eléctricas. Estos fallos incluyen los siguientes ejemplos:
-
- arrollamientos sueltos
- problema estator
- Corto circuito
La energía externa es verificada directamente como una tensión o desequilibrio de corriente, rango de voltaje, La corriente máxima y baja tensión o corriente.
9.2 El diagnóstico de problemas mecánicos con el MCM – Monitoreo Motor Eléctricos Estado
Las categorías de fallos mecánicos se detectan y diagnostican utilizando el espectro de PSD de la forma de onda de la corriente residual. La corriente residual es la diferencia de corriente entre la corriente observada y teórica producida por el modelo de motor interno utilizando la misma tensión observada. El espectro de PSD se divide en doce bandas de frecuencias que normalmente están asociados con ciertos problemas mecánicos (listados a seguir). El análisis de estas bandas de frecuencia produce clases de fallos para una mayor investigación.
-
- Fundación suelta / componentes
- desequilibrio / desalineación / enganche / cojinete
- Correia / elemento de transmisión / equipo accionado
- cojinete
- Rotor
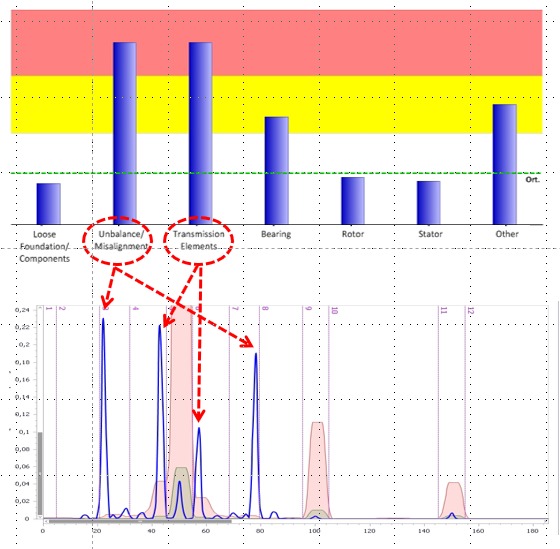
Figura 11 - El diagnóstico de daños mecánicos en el espectro de PSD de MCM – Monitoreo Motor Eléctricos Estado
Cabe señalar que la alarma de comprobación de carga, causado por la corriente anormalmente alta o baja, Por lo general es causada por un cambio en la carga de la máquina accionada. La máquina de carga se puede cambiar por dos razones: fracaso o proceso de cambio. Si la máquina está funcionando en una condición diferente que no se ve durante el periodo de aprendizaje, el usuario debe configurar la unidad MCM para actualizar la forma de aprender esta nueva condición. Si la carga se cambia debido a un fallo, el problema debe ser investigado y hay que asegurarse de que la alarma se borra en el monitor.
La base de datos del motor proporciona un análisis independiente en caso de que la unidad MCM aprender un sistema defectuoso. El motor de base de datos es a valores normales y altas para cada uno del espectro PSD doce pistas basadas en la experiencia con un gran número de motores similares. Si un valor residual de banda de espectro de PSD supera el alto valor de la base de datos, después de la comprobación persistente, Monitor le advertirá de que algo está mal.
10 Parametrización de los niveles de alerta y alarma
los niveles de aviso y alarma se establecen automáticamente por el sistema después de introducir el sistema de características del motor, a saber:
- tensión;
- amperaje;
- velocidad de rotación;
- etc.
El sistema no requiere la intervención de especialistas para definir estos valores.
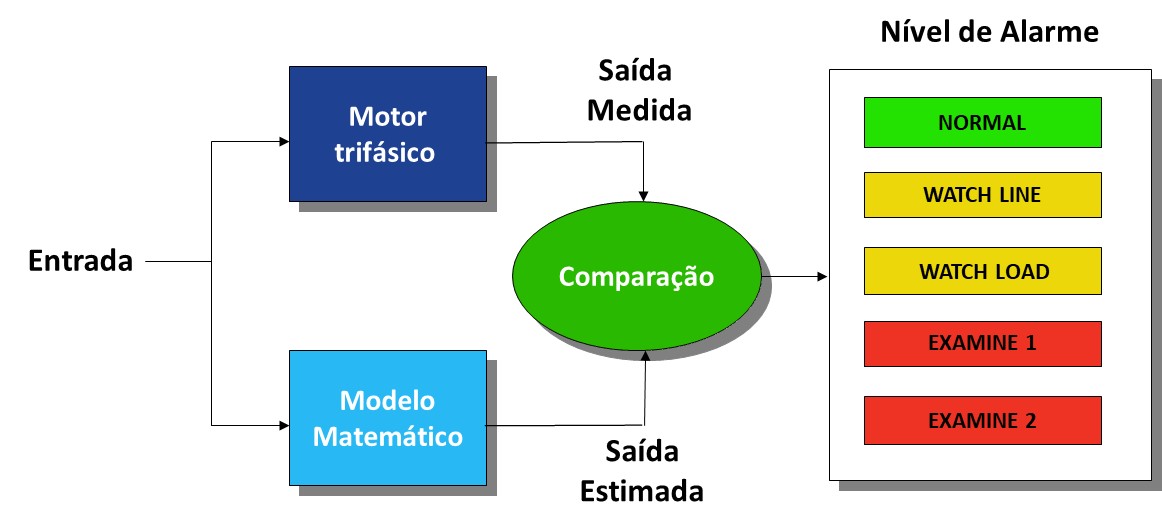
Figura 12 - los niveles de alarma y alerta se establecen automáticamente por los motores eléctricos sistema de análisis de MCM – Monitoreo Motor Eléctricos Estado
11 El informe
El informe se emite automáticamente por el sistema, sin la necesidad de una interpretación de un experto.
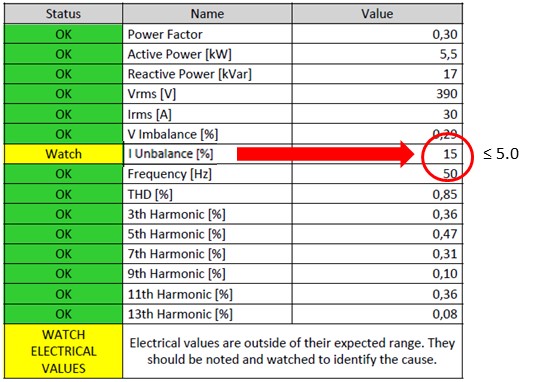
Figura 13 - Informe Stratus MCMMCM – Monitoreo Motor Eléctricos Estado, con la indicación de anomalía eléctrica
12 Limitaciones de MCM – Monitoreo Motor Eléctricos Estado
El MCM es un potente sistema de monitorización de motores eléctricos. Sin embargo, hay algunas limitaciones en su uso e interpretación.
- No se puede utilizar para motores de corriente continua o monofásica.
- Para variadores de frecuencia, la frecuencia del inversor de corte debe ser más de 2 kHz.
- unidad MCM no puede ser utilizado en motores con tensión o potencia que varía rápidamente. La carga / velocidad no siempre puede ser para variar muy rápidamente debido a la necesidad de un tiempo de aprendizaje, para cada condición de carga.
diagnósticos mecánicos se basan en la energía en doce bandas de frecuencias espectrales. Esta es, por la naturaleza, un análisis y de diagnóstico indicaciones aproximadas por lo general sólo representan amplias clases de problemas. Como es normal en los sistemas de monitoragem permanentes, el usuario necesitará para implementar inspecciones adicionales para confirmar y determinar el fallo real.
La unidad de MCM – monitoreo Motor Eléctricos Estado no puede ser utilizado en motores con voltaje o potencia que cambia rápidamente. el voltaje, la frecuencia y la amplitud de la corriente no deben cambiar con el 15% en seis segundos. Esto no es una limitación grave para la mayoría de aplicaciones, pero algunas aplicaciones, como trituradoras, No responden a este requerimiento. Si hay un cambio de carga repentina, el monitor rechazará esta muestra; sin embargo, la misma máquina podría funcionar constantemente con algo de carga, y esto permitiría a la unidad para supervisar la máquina.
La unidad de MCM – Motores eléctricos Condition Monitoring funciona bien en aplicaciones en las que se encuentra el motor a cierta distancia de los transformadores de potencial o actual. Sin embargo, la energía utilizada en el punto de medición debe estar dedicado a un solo motor. Por otro lado, uno centros de transformación establecidos se pueden utilizar para todos los motores que se suministran desde la misma fuente de voltaje. La restricción de medición de corriente es una consideración para aplicaciones bajo el agua, donde se puede alimentar al fondo del mar sólo se ramifican a múltiples motores. En este caso, MCM unidad no se puede utilizar en la alimentación principal. Sin embargo, Podría ser utilizado si los transformadores de corriente se podrían instalar en cada rama.
13 conclusión
O MCM – Motores eléctricos Condition Monitoring es un potente sistema y el análisis de los motores eléctricos de vigilancia. Su poder proviene algoritmos de procesamiento sofisticadas y análisis de señales y redundancia incorporadas. Su capacidad de aprender hace que los motores sensibles y flexibles y eléctricos base de datos protege contra las alarmas perdidas causadas por el aprendizaje de un motor ya defectuosa. La alarma es inteligente y utiliza el análisis estadístico combinado con una prueba de persistencia adaptativo. Estas características producen un producto que es una mejora significativa sobre el análisis de la firma actual de motor convencional y tiene un historial probado documentado muchos casos prácticos.
El DMC, así como proporcionar el servicio de MCM – Monitoreo Motor Eléctricos Estado también proporciona estos sistemas de monitoreo permanente.
En este enlace puede encontrar catálogos de este equipo.
Anexo I - Justificación de la modelización matemática del MCM – Monitoreo Motor Eléctricos Estado
Un sistema no lineal es descrito por las siguientes ecuaciones (eq.1):
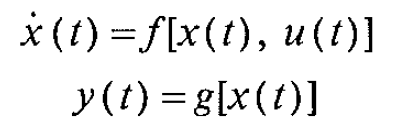
Linealizar estas ecuaciones en una condición de funcionamiento nominal y discretizadores ingresos (eq. 2):
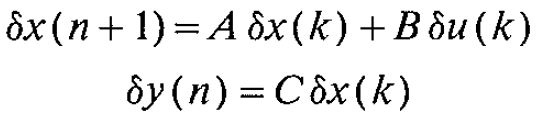
Ellos pueden ser colocados en forma canónica alfa (eq.3):
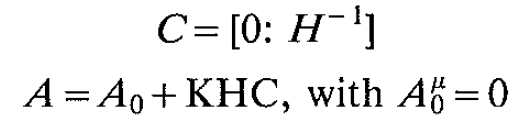
La expresión para el estado dX(k), no momento k, este sistema se da como (eq.4):

El uso de nilpotência UNA0 , la ecuación anterior se da como (eq.5):

Multiplicando ambos lados por la matriz C, esta ecuación se puede expresar en términos de variables de entrada y de salida medidas (eq.6):

La identificación y detección de fallos del sistema se realiza como sigue:
Estimación de la estructura; la línea por línea matriz de búsqueda observabilidad se utiliza para obtener niveles de observabilidad;
- estimación de parámetros; Se utiliza la técnica de mínimos cuadrados;
- La detección y diagnóstico de fallos utiliza tres criterios en paralelo:
- errores residuales
- variaciones de los parámetros
- Análisis espectral de residual
referencias
- diagnóstico de fallos para el motor principal del transbordador espacial, Ahmet Sensing; Diario de control de guiado y Dinámica 15(2) · May 1992
- Implementación de un modelo de detección de fallas basada y Diagnóstico de Fallos accionamiento del transbordador espacial Motor Principal, UNA. oye, T.-H. Guo, W. Merrill y J. Musgrave,1991,Tercera Conferencia Anual sobre la Vigilancia de la salud de los sistemas de propulsión espacial,
- Un fallo de detección distribuida y el diagnóstico del sistema utilizando la estimación de parámetros de línea en, Hear et al., 1991, NASA Technical Reports Server (NTRS) 19910016382
- Identificación de Sistemas de tiempo discreto multivariables: Una parametrización a través de una – Forma canónica, Elder y me entero de que, automático, Volumen 29, Problema 4, julio 1993, páginas 1127-1131