Analizador de vibraciones 6 – Ace Media
Seguidamente, en analizador de vibraciones 6, presentamos el tema de las medias, una vibración analizador. tan, este artículo es parte de una serie de artículos que explican cómo funciona un analizador de vibraciones.
Cuando lo hacemos Análisis de vibraciones, necesitamos entender cómo funciona un analizador. Por eso, aquí presentamos los conceptos de análisis de señales digitales, implementado en un analizador FFT. Para que sea fácil de entender, los presentamos siempre desde el punto de vista del usuario, a través de la observación de los resultados de mantenimiento predictivo.
Seguidamente, No hay enlace, podemos ver a gama de analizadores de vibración proporcionado por D4VIB.
En seguida, en Analizador de vibraciones 6, presentamos el contenido de esta serie de artículos.
- ¿Cuál es la relación entre tiempo y frecuencia?
- Cómo funciona el muestreo y el escaneo
- Qué es el aliasing y qué efectos tiene
- Cómo se usa y en qué consiste el zoom
- Cómo se utilizan las ventanas de forma de onda
- ¿Cuáles son los promedios para
- ¿Qué es el ancho de banda en tiempo real?
- Para que sirve el procesamiento de superposición ("superposición")
- Que es el seguimiento de pedidos
- Que es el análisis de envolvente
- Las funciones de dos canales en el dominio de la frecuencia
- Para que sirve Orbit
- ¿Cuáles son las funciones de un canal en el dominio del tiempo?
- En qué consiste el Cepstro
- ¿Cuáles son las unidades y escalas del espectro?
6 – Analizador de vibraciones 6 – Que son los promedios y para que sirven en un analizador
De tal manera que el funcionamiento de un analizador, ser más fácil de entender, a menudo usamos ejemplos de señales sin ruido. Sin embargo, como Para la implementación de esta técnica se requiere la existencia de un sensor taquimétrico que informe permanentemente al equipo de medición sobre la velocidad de rotación del eje donde se están realizando las mediciones. como. en realidad, a menudo medimos la vibración real, en presencia de un nivel de ruido significativo. Por otro lado, en otras ocasiones, las vibraciones que intentas medir, son muy similares al ruido.
tan, debido a estas dos condiciones comunes, tenemos que desarrollar técnicas para:
- En primer lugar, medir señales en presencia de ruido,
- Seguidamente, medir el ruido en sí.
en realidad, sabemos por las estadísticas que la técnica más común para mejorar la estimación de un valor varía, consiste en promediar.
De igual forma, cuando vemos una lectura de ruido en un analizador, podemos intentar adivinar el valor promedio. Por otro lado, cómo los analizadores tienen la capacidad de realizar cálculos, podemos pedirles que calculen el valor medio.
6.1 – ¿Cuál es el RMS promedio?
se debe notar que, cuando miramos el espectro y tratamos de estimar el valor promedio de los componentes del espectro, de hecho, estamos haciendo un promedio simplificado del nivel. De facto, estamos tratando de determinar, “el ojo”, el promedio de la señal.
De facto, esta técnica de promediar, es muy valioso para determinar el nivel promedio, en cualquiera de las líneas del espectro. Cuantos más promedios hacemos, mejor será la estimación del nivel medio.
Por ejemplo, en la figura 6.1, vemos espectros promedio de:
- Ruido aleatorio de un generador de funciones,
- Señal procedente de un generador de funciones,
- Voces humanas medidas con un micrófono.
De facto, en estos signos, el valor instantáneo de cada componente del espectro varía ampliamente. Por otro lado, cuando vemos el valor medio, podemos ver bien las propiedades básicas de los espectros.
una) Aquí ves el espectro de ruido aleatorio

do) Aquí vemos los espectros correspondientes a las voces de las personas.
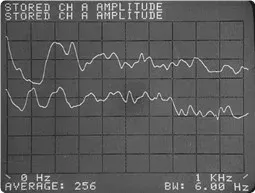
- El gráfico superior muestra: voz femenina
- El gráfico inferior muestra: voz masculina.
Figura 6.1. En estas figuras vemos el resultado de utilizar el promedio RMS.
De facto, RMS significa “raíz cuadrática media”, y se calcula de la siguiente manera:
- En primer lugar, se calcula la suma de cuadrados de los valores individuales, dividir por el número de medidas.
- Seguidamente, es la raíz cuadrada de la suma.
en realidad, si desea medir una pequeña señal en presencia de ruido, el valor eficaz medio da una buena estimación de la señal más el ruido.
Por otro lado, con el RMS medio, no se puede mejorar la relación señal-ruido.
De facto, con este tipo de promedio, solo hacemos estimaciones más precisas del resultado de la suma de la señal más el ruido.
6.2 – Cómo funciona y cuál es el tiempo medio (o sincrónico)
6.2.1 En primer lugar, en qué consiste este promedio
A veces, para mejorar la relación señal / ruido de una medición, usamos a media lineal en el dominio del tiempo. Podemos usar esta técnica, cuando tenemos una señal de tacómetro.
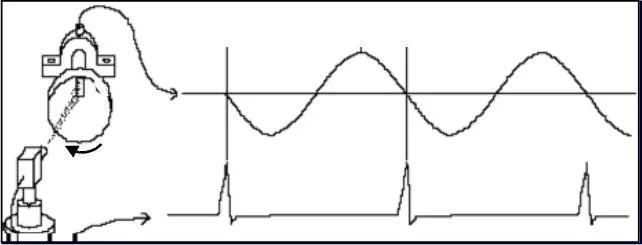
Figura 6.2 – en esta figura, vemos el uso del tacómetro, para medición sincronizada con rotación de la máquina.
tan, al usar esta técnica, el tacómetro se utiliza para activar el inicio de un registro de bloque de tiempo.
En estas condiciones, la parte periódica de la entrada siempre será exactamente la misma, en cada bloque de tiempo que tomamos. De facto, Cuantos más promedios hagamos, más tenderá el resultado a la forma de onda, que se repite en todos los bloques de tiempo.
Por lo contrario, ya que el ruido es diferente en cada bloque de tiempo, tenderá, con el promedio, a ir para zero. De facto, cuantos más promedios tomamos, más cerca el ruido llega a cero.
De esta forma, se mejora la relación señal-ruido de nuestra medición.
6.2.2 Ejemplos de aplicación del promedio de tiempo
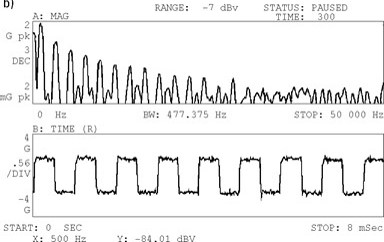
Por ejemplo, a figura a seguir, muestra un bloque de tiempo de una onda cuadrada, escondido en el ruido. De facto, después 300 medios de comunicación, el bloque de tiempo resultante promedio, la relación señal-ruido tiene una marcada mejora. en realidad, la onda cuadrada se ve mucho mejor.
De esta forma, al calcular la FFT del bloque de tiempo medio, vemos muchos mas armónicos. en realidad, como daño, debido al nivel de ruido reducido, se puede medir con precisión.
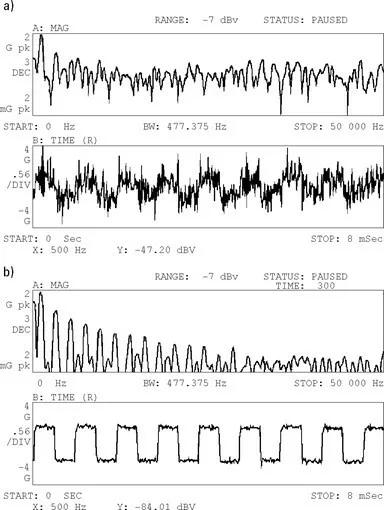 una) En primer lugar, ves el espectro y la forma de onda, resultante de un solo bloque de tiempo.
una) En primer lugar, ves el espectro y la forma de onda, resultante de un solo bloque de tiempo.
segundo) Después, ves el espectro y la forma de onda, resultante de 300 promedios de bloque de tiempo.
Figura 6.3. Aquí vemos el resultado de aplicar 300 medios de comunicación, en una onda cuadrada con ruido.
6.3 ¿Cuál es la retención máxima promedio para (retención de pico)
A continuación, veamos el tema de la retención máxima promedio. De facto, este promedio es diferente a los anteriores. tan, esta técnica funciona mostrando y reteniendo el nivel máximo, en cada frecuencia, sobre una sucesión de medidas. tan, puede proporcionar un historial de niveles máximos, cada frecuencia, a lo largo de las medidas realizadas.
Seguidamente, en la figura, presentamos dos ejemplos de aplicación.
En primer lugar, en (una), la retención máxima se utilizó durante una parada de la máquina. tan, este gráfico muestra el nivel máximo en cada frecuencia. ordinariamente, este nivel máximo ocurre en 1 x rpm.
En este caso, el gráfico inferior (segundo), es un pico de retención durante un período relativamente largo. Durante este período se produjo la variación de velocidad de un motor de velocidad variable.. tan, esta tabla se puede utilizar, por ejemplo, como indicación de variación de carga.

Figura 6.4 El promedio de retención de picos se utiliza para rastrear las vibraciones máximas cuando una máquina está parada e indicar variaciones de velocidad a lo largo del tiempo..
6.4 El promedio exponencial
Para concluir, cuando quieras verlo en tiempo real, una vibración muy ruidosa, o variar, se usa el promedio exponencial.
Promedio exponencial, Los bloques de tiempo no contribuyen al promedio por igual. De facto, un nuevo récord pesa más que los viejos.
El valor en cualquier punto de la media exponencial viene dado por:
y [norte] = y [n-1 * (1 – un) + X [norte] * un
donde:
- En primer lugar, n es la enésima media y el enésimo nuevo bloque de tiempo.
- Seguidamente, alfa es el coeficiente de ponderación.
- ordinariamente, alfa se define como 1 / (Número de promedios).
Por ejemplo, en el analizador, si el número de promedios se establece en 3 y el tipo de promedio se selecciona como promedio exponencial, entonces α = 1/3.
La ventaja de este tipo de soporte es que se puede utilizar sin fin. A diferencia del RMS promedio, la media exponencial no se detendrá después de n veces.
Como se mencionó, el promedio RMS termina después de cierto número de promedios. Por lo contrario, este tipo de medio se sigue ejecutando hasta que lo detengamos. De esta forma, el resultado promedio cambia a medida que adquirimos nuevos registros y gradualmente ignoraremos los efectos de los registros antiguos.